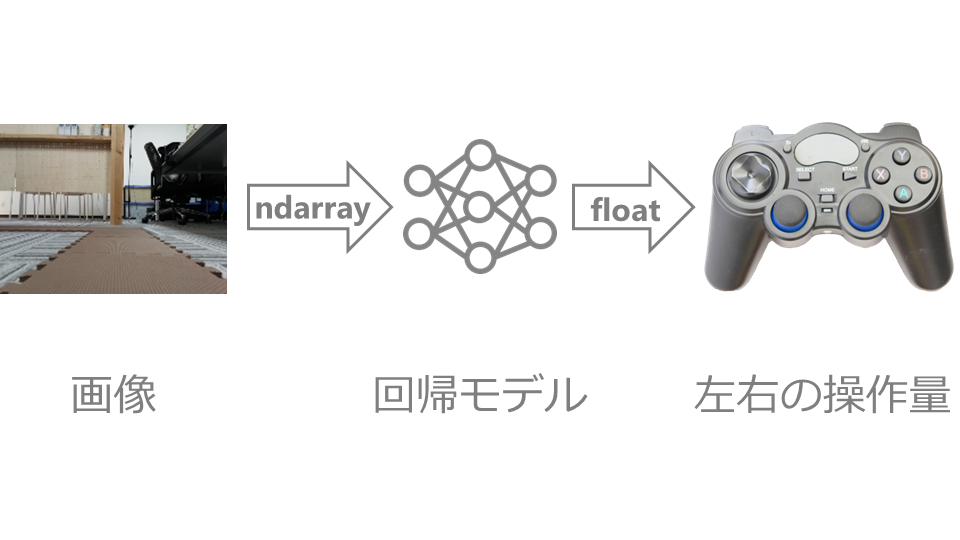
Alpacar(アルパカー)とはAIで技術のパラダイムシフトを体感できる自動運転ロボットカーです。カメラ以外のセンサーは付いておらず、コース、壁、障害物などの物体検出も行っていません。走行時の瞬間の画像を入力、人の操作を出力としたEnd to Endのディープラーニング回帰モデルです。プログラミングだけでなく、ハードウェア組み立て、組み込み技術も含めて学びます。
まず人が操作して画像データと操作データを溜めます。溜まったデータを教師データとしてディープラーニング学習させます。カメラ画像から操作を推論するAIができるため、自動運転が可能となります。
本コンテンツは、前半に組み立て・環境設定・操作・学習・自動運転まで一気に体験まで行い、後半に各技術項目に分かれて仕組みを理解しながら学んでゆきます。
Alpacarは、ハンダ付け一切不要で組み立て可能です。

学べること
- ロボットカー及び電子回路の組み立て
- Colaboratoryの使い方
- Python基礎
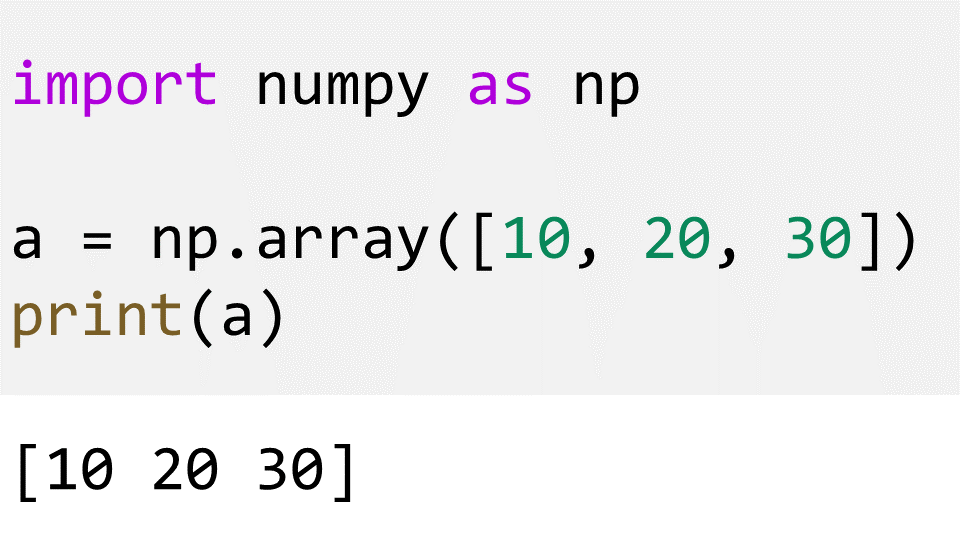
- NumPy基礎
- OpenCV基礎
- カメラ制御
- GamePad制御
- モーター制御
- オリジナルデータセット作成方法
- ディープラーニング回帰
- Raspberry Piにおけるリアルタイム推論
部品購入
- 必須
工具
- 必須
ただし、ハンダ付けなどの難しい作業は一切ありません。「部品購入」チャプターに記載してある通り、はさみ や ドライバーセット など一般的な工具のみで、家にあるモノで構いません。100円ショップでも購入可能な工具です。
必要な環境
どれも無料
- Chrome
- Googleアカウント
- Colaboratoryが起動できて実行できること
必要なスキル
- 初歩的なプログラミング力
- Raspberry Piの基本設定と基本操作

Alpacarの仕組み
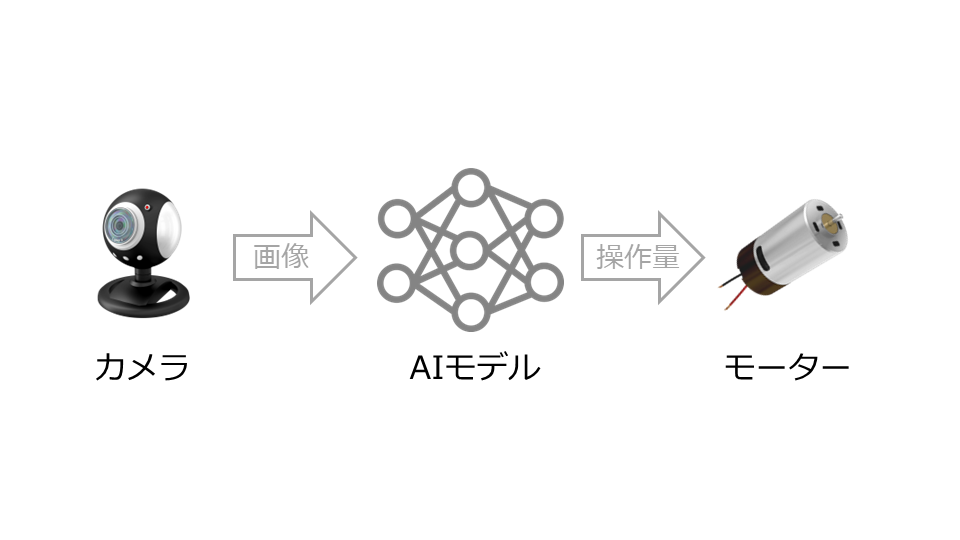
ゲームパッドを操作して走行させると、画像データと操作量データが溜まります。溜まったデータを教師データとしてディープラーニング学習させることで、何らかの画像が入力されると操作量を出力するAIモデルが生成されます。このAIモデルをロボットカーに実装することで、カメラ映像だけでモーター制御値が決まり、自動運転が可能となる仕組みです。
何がパラダイムシフトなのか?
Alpacarでは以下のような従来よくある制御について、コードに一切記述しておりません。
- 白線を検知して方向を決める
- 壁があるから近づかない
- 障害物があるから避ける
- コースの上を走る
従来であれば、物体検出等を行ったとしても、その後に条件分岐やフェールセーフなど人が考えて制御を記述する必要がありましたが、Alpacarではディープラーニング出力結果をほぼそのままモーター制御に反映しています。100%完璧ではありませんが、大きくコースアウトすることなく、あたかも人が操作しているかのように走行します。また、多少の環境変化にも耐えるロバスト性があることも特徴的です。
他のAIカーに対する優位性
- 安価
- コンパクト
- 仕組みがシンプル
- スタンドアローン動作可能
他のAIカーに比べて、汎用的で調達しやすい部品で構成されているため安価であること、コンパクトであるため一般的な家の中でも走行可能であること、技術習得をメインと考えているため回路図やソースコードがシンプルであること、PCなしのスタンドアローン動作が可能であることが特徴です。
Alpacarのねらい
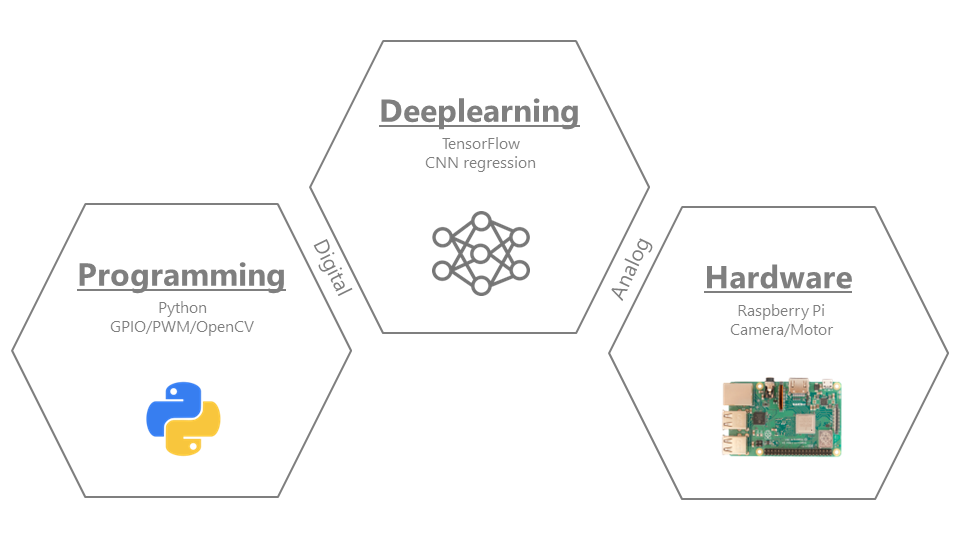
Alpacarはディープラーニングだけでなく、プログラミングとハードウェアの技術を広く浅く使っています。
それぞれの基礎を学び、従来のモノづくりや従来のプログラミングにディープラーニングを実装する具体的な手法と理解を習得できます。特にハードウェア系の人にとっては、ディープラーニングはプログラミングを使って記述するため全く異なる分野だと思われがちですが、ディープラーニングからの出力はアナログ値に近いです。これはハードウェア系に取って非常に親和性が高いと感じています。
ディープラーニングを用いることで圧倒的なコストダウン(工数削減)を実現できる場合があります。実務への応用としては、ディープラーニングで全く新しいモノを生み出すことよりも、コストや工数で諦めていたモノを実現可能にすることに活かせると考えています。Alpacarはこのような新しい時代のものづくりやプログラミングを目指します。
概要
Alpacarを作るのに必要な部品の費用は、配送料とRaspberry Pi(以後ラズパイと略します)を除くと約16,000円です。
費用の大部分は「ラズパイケース」「ラズパイカメラ」「microSDカード」「無線ゲームパッド」「モバイルバッテリー」などの部品が占めており、Alpacar以外の用途にも使い回しができるモノばかりです。
ここではラズパイでAlpacar制御やディープラーニング推論ができるようにインストールを行います。
ラズパイの基本である「Raspberry Piの初期設定」「VNCで遠隔操作」「テキストエディタnano」は理解できている前提で進めます。
Raspberry Pi側のソースコード配置とGoogle Colabolatoryのソースコード配置を行います。
Google ColabolatoryはPC側の操作を想定しています。
では、ここから組み立てに入ってゆきます。
分かりやすいように写真をたくさん使い、文章による説明は短めにしています。
はじめに

ロボットカーの箱に入っている説明書とは少し異なる部分もあるので注意
ネジとナットの確認
ロボットカーの箱に入っている以下のネジとナットを確認

- 小ネジ8個
- ナット8個
- タッピングネジ4個
※その他の袋には大ネジが入っている(後で使う)
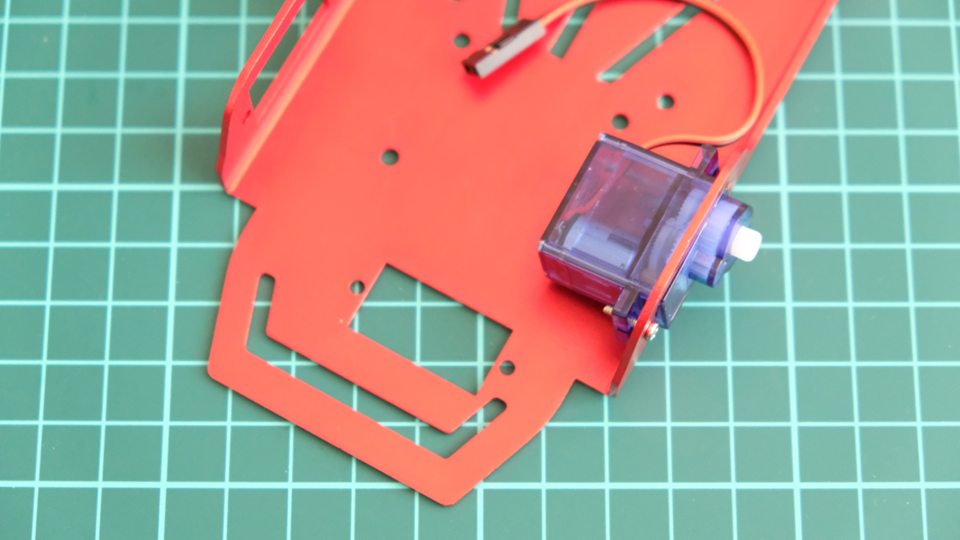
モーター固定
車体にモーターをはめて、小ネジとナットで固定する
ラジオペンチを活用することで締めやすくなる
手順1:モーターと小ネジを挿し込む
モーターの向きに注意。モーターの線が車体の内側になるようにする
手順2:ラジオペンチの先端でナットを掴む
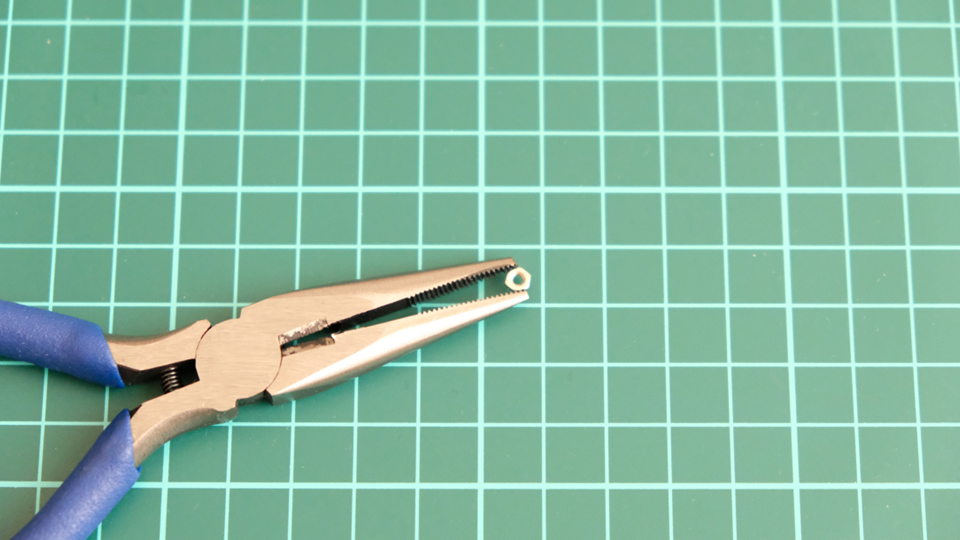
なるべく先端で掴むこと
手順3:ナットを固定してドライバーで回す
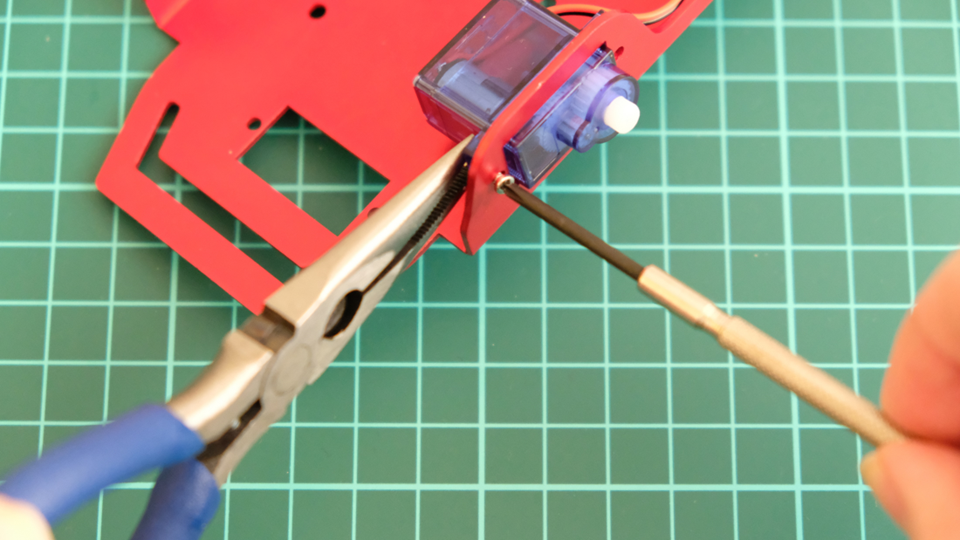
使用している工具はプラスドライバーNo.0
全箇所で行う
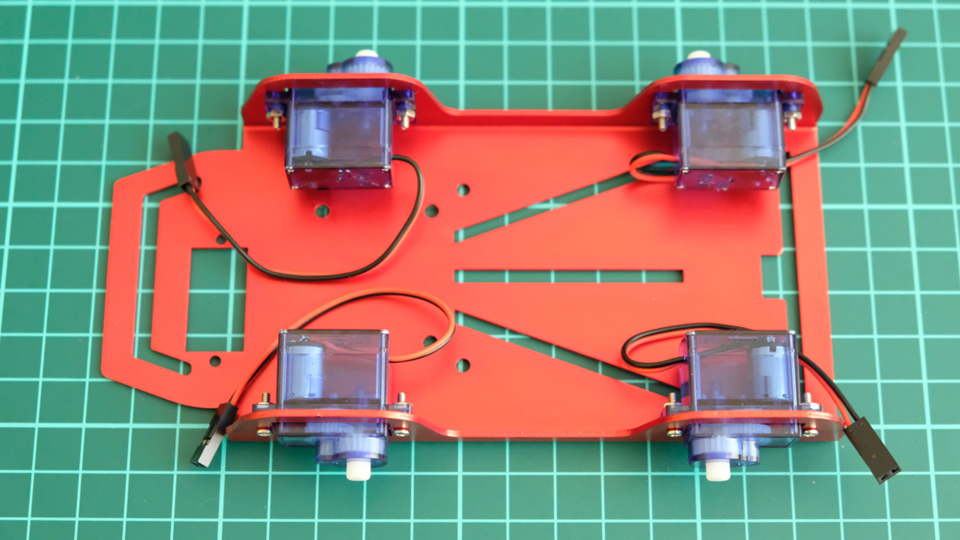
先程の手順をモーター1個あたりに対して2箇所で実施。全モーター4個全て実施する
モーター基板取り付け
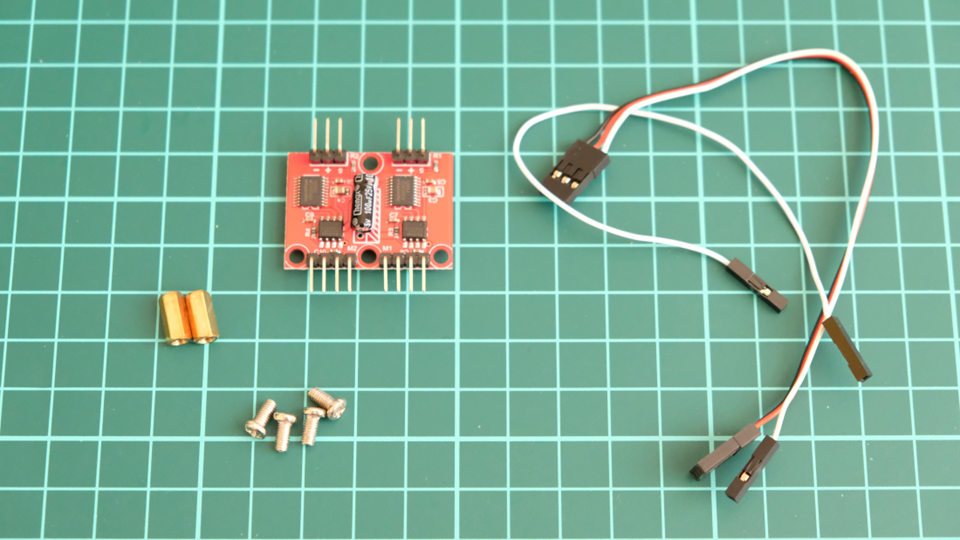
- モーター基板
- 小スペーサー2個
- 大ネジ4個
- コネクタ付きジャンパー線2本
コネクタ付きジャンパー線が挿入されていたと思うが、使わないため両方とも外しておく
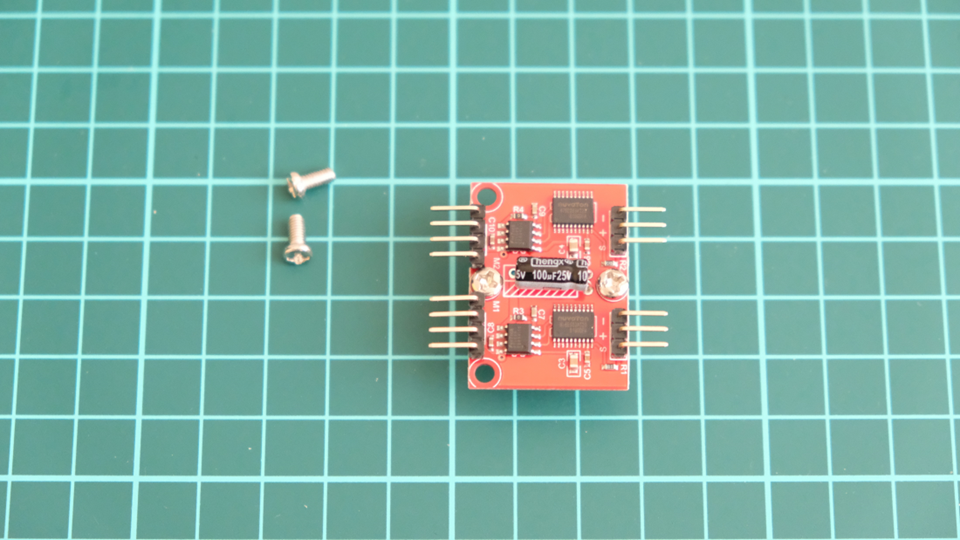
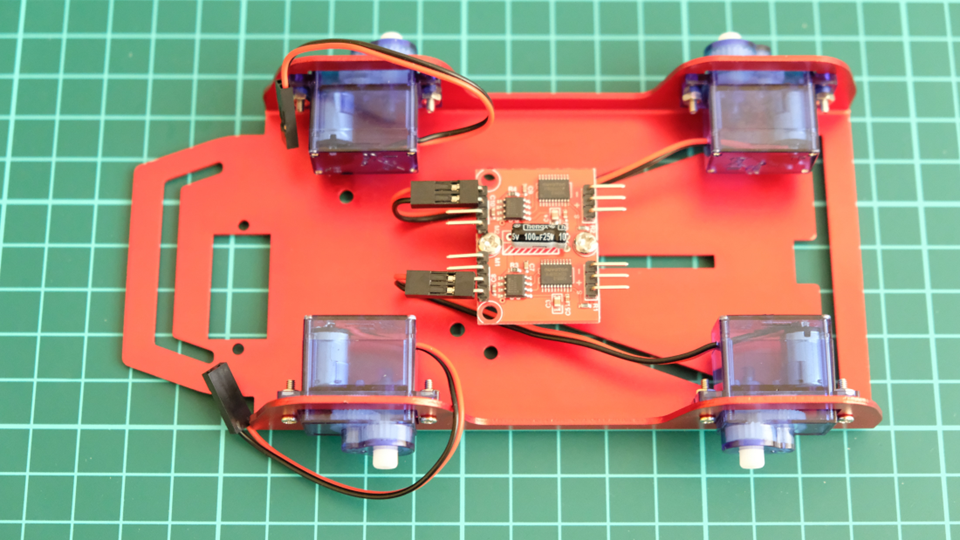
基板の穴4箇所に対し、写真の通り2箇所に大ネジと小スペーサーを取り付ける
ピンが4本ある側は、狭くて少しきついかもしれない
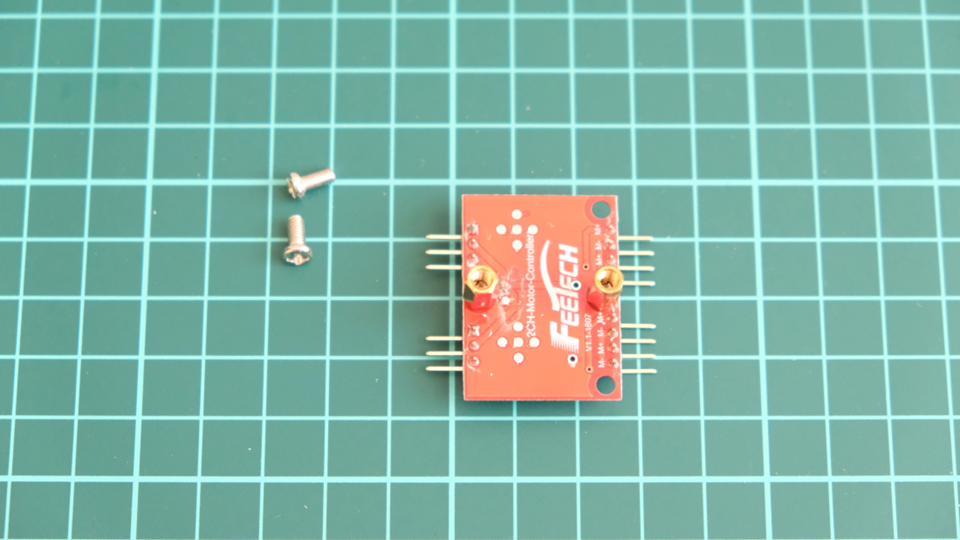
裏側の写真。最初は手で締めて、その後プラスドライバーNo.1を使ってきつく締めると良い
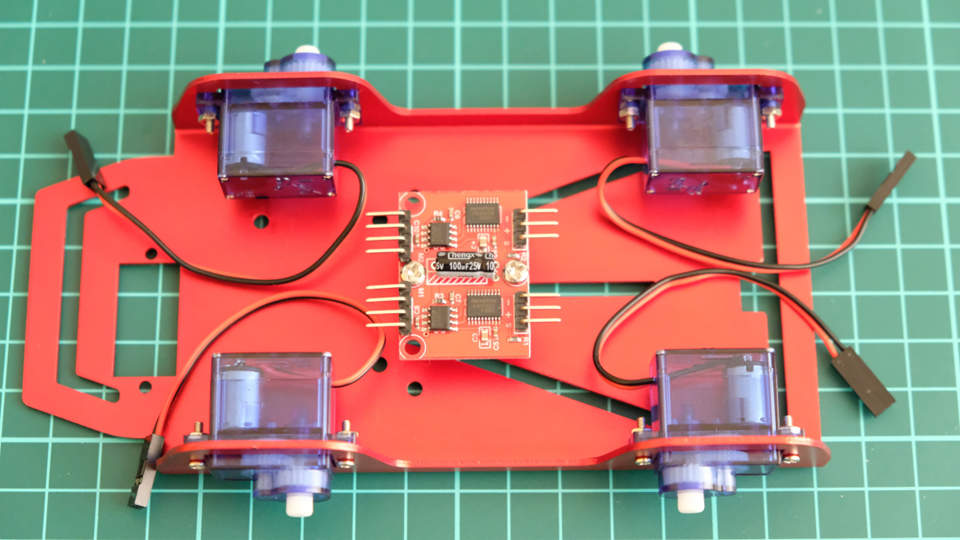
残りの大ネジを使って車体に取り付ける
取付方向は上記写真の通り、4ピン×2つのコネクタが左側に来るようにする
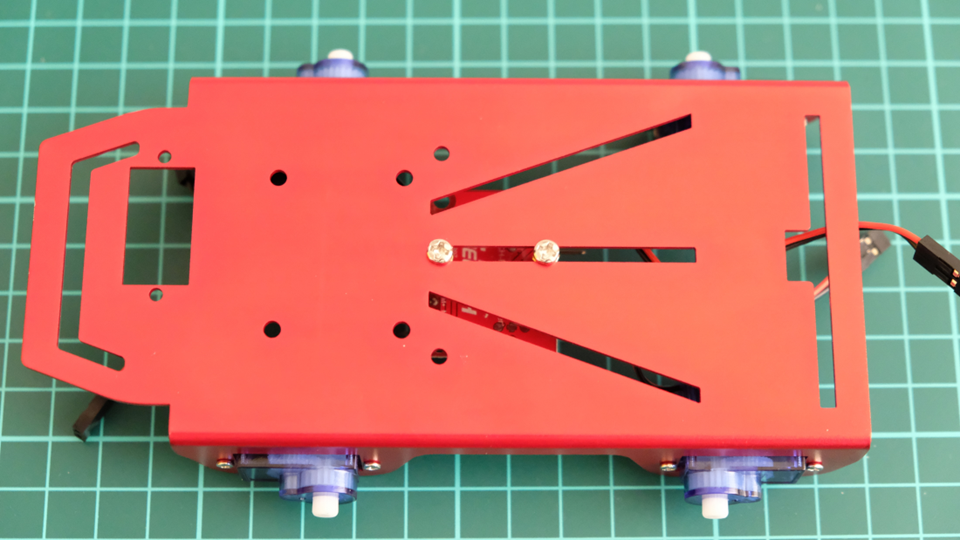
裏側の写真。取付位置は左寄せ。
写真の通り、右側のモーターのコネクタをそれぞれ取り付ける
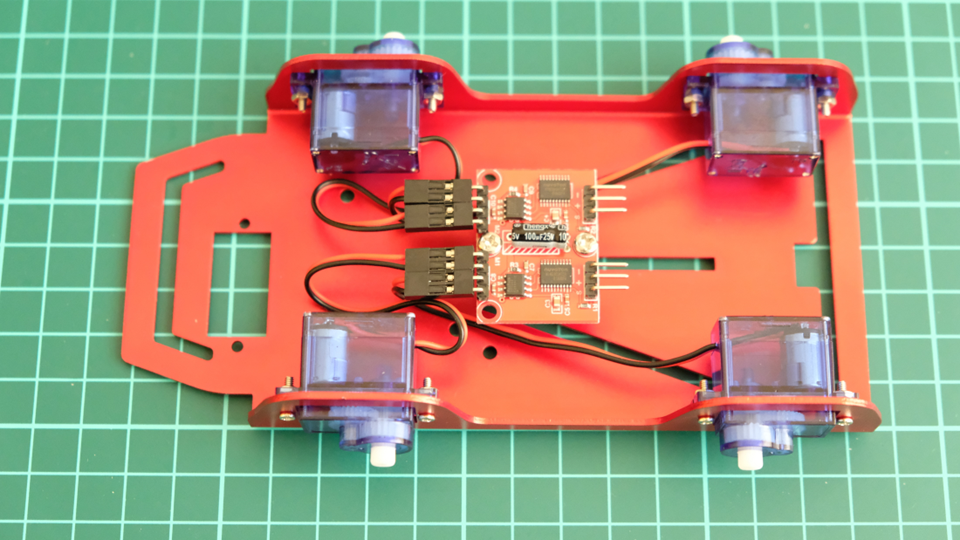
同様に左側モーターのコネクタも写真の通りに取り付ける
タイヤ取付け
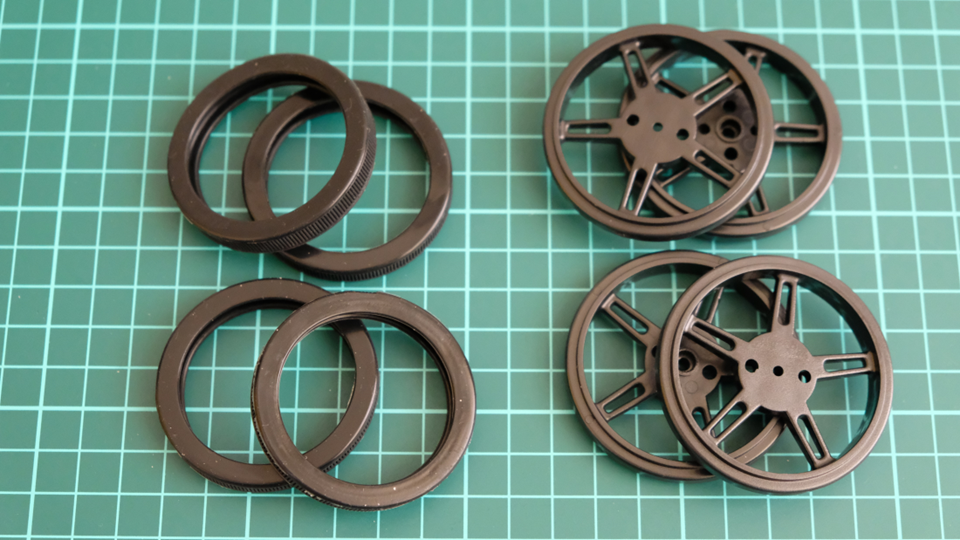
ゴムタイヤとホイールを取り出す
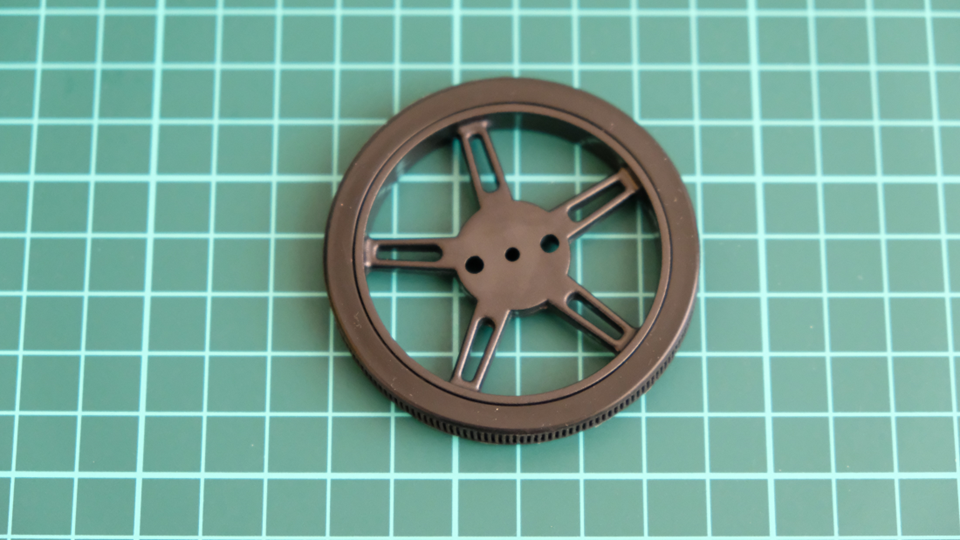
ホイールにゴムタイヤをしっかりはめる
ゴムタイヤは手で簡単に伸びる

4セット作る
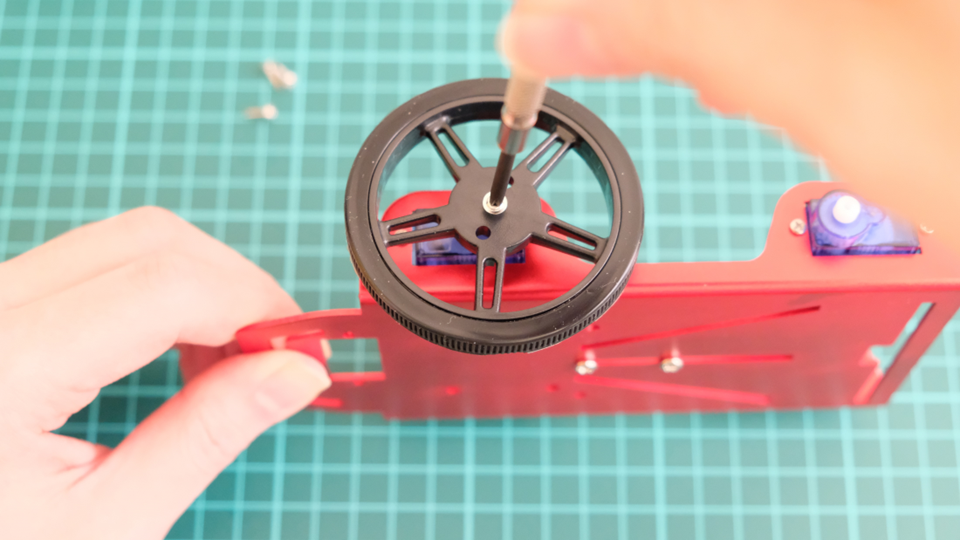
モーターにタイヤをしっかりと挿し込み、タッピングネジをNo.1のプラスドライバーでなるべく真っ直ぐ締める
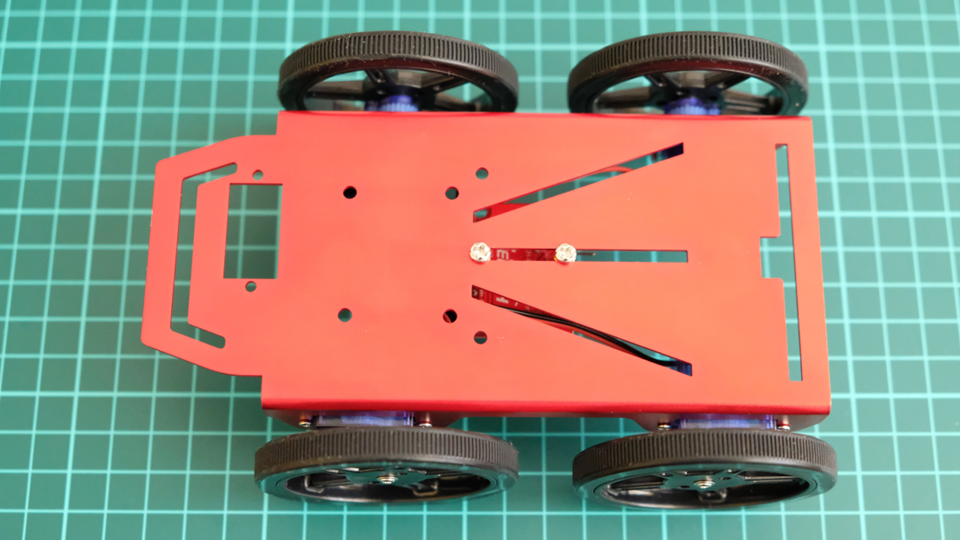
全ての箇所に取り付ける
環境をインストールして組み上げたアルパカーを、PCとVNCを使って一通り操作します!
- 学習データ作成
- ディープラーニング学習
- ディープラーニング推論
まさに「実践!アルパカー」で行った内容そのものです。コースを作って走らせてみて下さい。
コースで走行のポイント
ここから後半開始です。
すでにColaboratoryは使ってきましたが、改めて使い方を学びましょう。
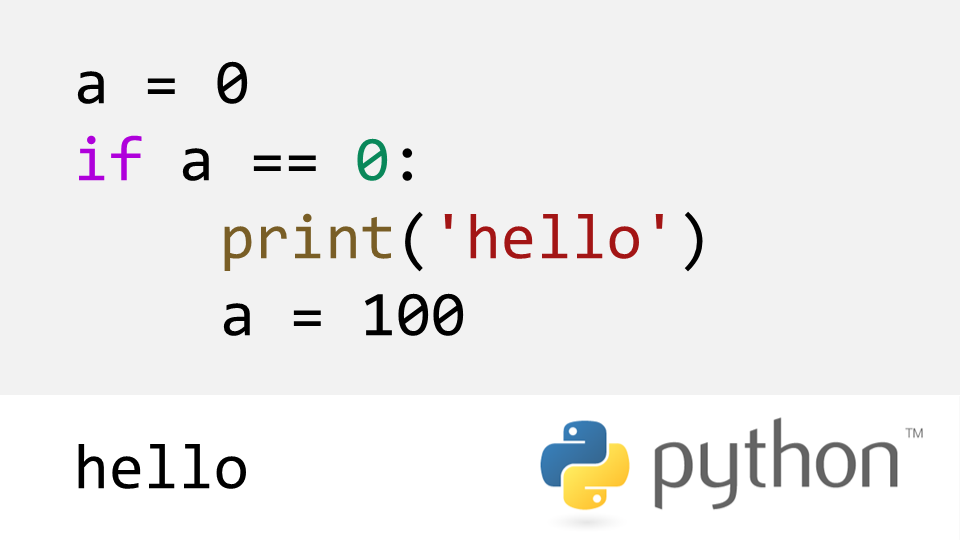
Pythonとは
Pythonは最近よく使われているプログラミング言語のうちの1つです。

カメラ映像の入出力、文字列の描画、画像の保存などを主に行います。
ハードウェア

Raspberry Pi用の高精細ビデオカメラ
接続箇所:Raspberry Piボード上の15ピンMIPIカメラシリアルインターフェイス(CSI)コネクタ
Pygameを活用してGamePadの入力を制御します。
ハードウェア

- 単3電池×2本
- 裏に電源スイッチ
- スリープ時は
STARTボタンで復帰
GPIOからPWMでモーター制御します。
ハードウェア
走行時のカメラ画像と操作データを保存する方法を学びます。
これまで学んだ組み込み技術の集大成です。
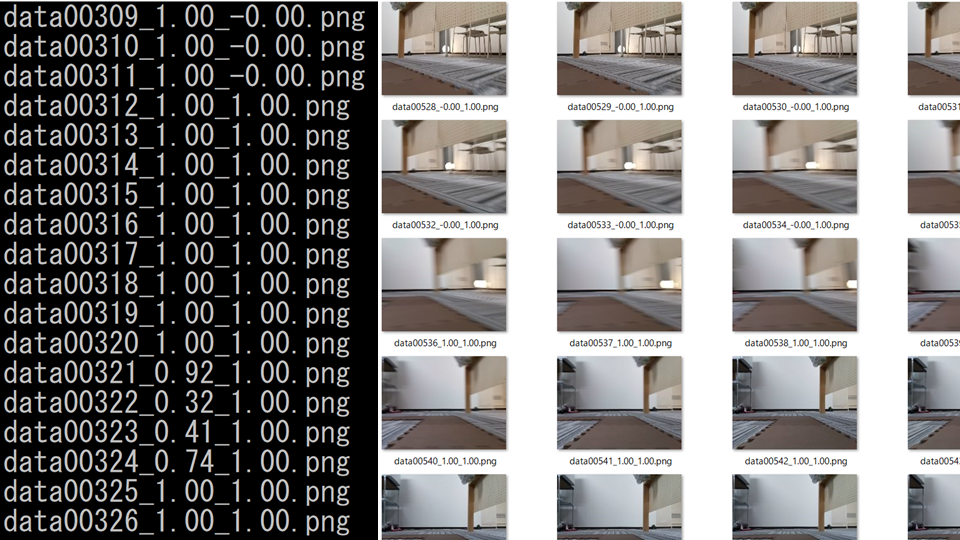

任意の画像を取り扱う
前のチャプターでは「Kerasのデータセットで学習して、Kerasのデータセットで推論」を行っていましたが、ここでは「任意の画像ファイルで学習して、任意の画像ファイルで推論」を行います。
これを実現するためには、画像データの準備及びGoogleドライブと連携が必要になります。
概要
これまでは「CNN分類」を行ってきましたが、ここからは「CNN回帰」を行います。

「運転データセット作成」で最後にアップロードしたデータを使ってディープラーニング学習を行います。
ここまではColaboratoryで静止画に対して1つずつディープラーニング推論していました。
ここではカメラ映像を入力して、リアルタイムにディープラーニング推論します。
リアルタイム推論結果をモーター制御に反映させ自動運転を完成させます!
総合演習
「リアルタイム推論」の演習解答にモーター制御を加えて、リアルタイム推論による自動運転を完成させてください。これまで学んだコードで対応可能です。
概要
- 物体A(動画では茶色のマット)をアルパカーの前に置くと、アルパカーが近づく
- 物体B(動画では白い厚紙)をアルパカーの前に置くと、アルパカーが離れる
- 物体Aと物体Bは「運転データセット作成」で学習させた物体
- オリジナルで仕様追加や仕様変更歓迎!
ここではアルパカーに関するFAQを紹介しています。
不定期でアップデートします。
「ものものテックQA掲示板」と「コンテンツの変更履歴」です。